Sanal refakatçi, kamyonların yollardaki güvenliğini artırıyor

Bosch; proje ortakları Volkswagen, MAN Truck & Bus, Stuttgart Üniversitesi, Hochschule der Medien, Spiegel Institut ve CanControls ile birlikte yürüttüğü ve kamu tarafından finanse edilen ‘TANGO’ isimli projede konsorsiyum liderliğini üstlendi.
Kamyonlar, lojistiğin temelini oluşturur. Almanya’da taşımacılığın dörtte üçü karayoluyla gerçekleşmektedir. Zaman baskısı, uzun çalışma saatleri ve monoton uzun sürüşler, kamyon sürücülerinin günlük rutininin bir parçasıdır. Bir sürücünün dikkati dağılmışsa, aşırı yorgunsa veya çok yavaş tepki vermeye başladıysa bunun sonuçları felaket olabilir.
İşte bu noktada otonom sürüş fonksiyonları, kazalardan ve tehlikeli durumlardan kaçınmanın anahtarıdır. Otonom sürüş fonksiyonları her ne kadar sürücüleri uyarıp kritik durumlarda onları destekleyerek, gittikçe monoton ve yorucu görevleri daha fazla üstlenebilse de bu yine de insanların yerinin doldurulabileceği anlamına gelmiyor. İnsan, gerekli olduğu her durumda kontrolü eline almalıdır.
Araç ve sürücü arasındaki etkileşimi koordine etmenin ideal yolunun ne olduğu TANGO projesinin son üç buçuk yıldır odak noktası oldu. TANGO, Almanca açılımına göre “Technologie für automatisiertes Fahren, die nutzergerecht optimiert wird” demektir ve Türkçede “Kullanıcı yararına optimize edilmiş otonom sürüş teknolojisi” anlamına gelir.
Kısmi ve koşullu otonom sürüşe odaklanılan (SAE Seviye 2 ve 3) projede sürücüyü uyanık tutan, yorgunluğu gideren ve sürüşü olabildiğince keyifli hale getiren bir sanal refakatçi ‘dikkat ve aktivite destek sistemi’ prototipi üretildi. Konsorsiyum lideri konumundaki Bosch’a ek olarak, projenin diğer katılımcıları arasında Volkswagen, MAN Truck & Bus, Stuttgart Üniversitesi, Hochschule der Medien, Spiegel Enstitüsü ve CanControls yer aldı. TANGO, Almanya Federal Ekonomi ve Enerji Bakanlığı’ndan (BMWi) yaklaşık 5 milyon Euro hibe desteğiyle finanse edildi.

Destek seviyesini, sürüş ve sürücünün durumunu göz önünde bulunduruyor
Bosch proje yöneticisi Michael Schulz, “Gelecekte, manuel ve otonom sürüş aşamaları değişecek. Bir bayrak yarışında olduğu gibi, direksiyon sorumluluğu araçtan sürücüye ve sonrasında da sürücüden araca geçecek. SAE Seviye 2’ye göre kısmi otonom sürüşte, sürücü herhangi bir zamanda müdahale etmeye hazırlıklı olmalıdır; SAE Seviye 3’e göre koşullu otonom sürüşte ise sürücü yalnızca gerektiğinde müdahalede bulunur. Amaç, sürücünün her zaman kontrolü ele alabilmesi için sürücüden gelen talepleri optimum seviyede tutmaktır” dedi.
Dikkat ve aktivite destek sistemi işte bu noktada devreye giriyor. Böylelikle, sürücünün durumuna ve gerçek sürüş durumunun neye izin vereceğine bağlı olarak ikincil aktiviteler sağlanabilir. Sürücüye ayrıca; müzik veya sesli kitap dinleme, e-posta okuma, mesaj yazma, film izleme, günün randevularını planlama, rota planlama, fitness egzersizleri yapma gibi çeşitli ikincil aktiviteler de sunabiliyor. Sistemin yalnızca belirli sürüş durumunu güvenilir bir şekilde belirlemesi değil, aynı zamanda herhangi bir anda sürücünün yorgunluğu veya dikkatinin dağılması gibi durumları da algılaması ve doğru şekilde yorumlaması gerekir.
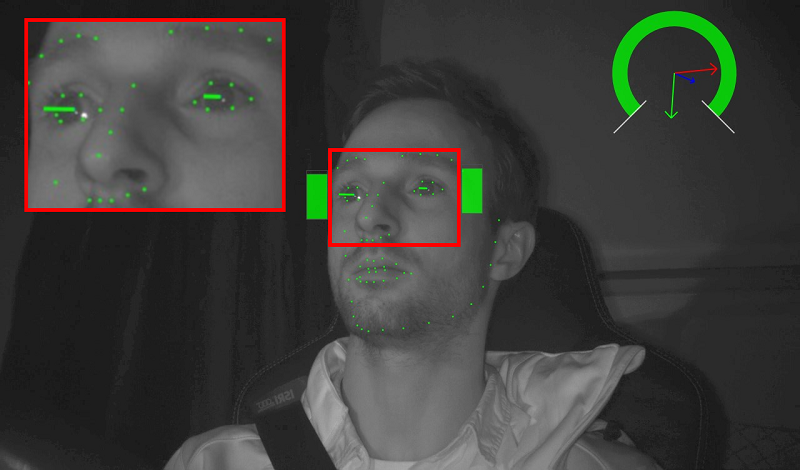
Ayrıca araştırma projesi, iç mekanı izlemek için sensörler kurarak bunları yapay zeka yöntemleriyle birleştirdi. Kameralar, sürücünün gözlerinin kapanışını, sık sık göz kırpmasını, yol görüşünü kaybedip kaybetmediğini veya başının yorgunluktan düşüp düşmediğini algılar. Akıllı algoritmalar görüntüleri değerlendirir, yorumlar ve karşı önlemler başlatır. Bunlar bir uyarı, ikincil bir faaliyet gerçekleştirme önerisi veya fren yapma gibi aktif bir müdahale olabilir.
Geliştirme süreci, kullanıcının ihtiyaçlarına odaklanıyor
Araştırmacılar, yorgunluk ve dikkat dağınıklığının temel nedenlerine ulaşmak ve dikkat ve aktivite destek sisteminin gereksinimlerini kesin olarak belirlemek için, kamyon sürücülerine güzergahlarında eşlik etti, deneyimleri hakkında onlarla görüşme yaptı, çevrimiçi günlük kayıtları değerlendirdi ve revizyonlar yapmak için deneklerle geliştirme aşamaları hakkında fikir alışverişinde bulundu.
Bu süreç, sürüş simülatörleri, test araçlarında sürüş ve hatta biraz da sihir içeriyordu. Sağdan direksiyonlu bir kamyonda, kabinin yolcu tarafında da bir direksiyon simidi, fren pedalı, gaz pedalı ve her iki taraf özel bir ekranla ayrılmış olarak gerekli tüm kontrol ve görüntüleme unsurlarıyla donatıldı. ‘Oz Büyücüsü’ olarak adlandırılan bu yaklaşım, araştırmacıların otomatikleştirilmiş işlevi simüle etmesini ve gerçekçi koşullar altında kullanıcı davranışını gözlemlemesini sağladı.
Schulz, “Çalışmamızı bilinçli olarak kullanıcıya ve kullanıcı gereksinimlerine odakladık” derken, araştırmacılar, kamyon sürücülerinin teknolojiyi sorumluluklarının ellerinden alınmasıyla ilişkilendirmeleri ve işlerinin de elinden alınabileceğinden endişe duymaları nedeniyle genellikle otonom sürüşe karşı temkinli oldukları önermesinden yola çıktılar. Proje sayesinde konfor, daha rahat sürüş ve gidilecek noktaya varışa ek olarak, otomasyon konusunda en güçlü destekleyici unsurun güvenlik olduğunu tespit edildi.

Araştırma bulguları otomobillere de uygulanabilir
Bu söylemin arka planında, insan-makine arayüzüne (HMI) özel bir vurgu yapılıyor. Schulz, “Gelecekte, bir aracın sürücüyle etkileşime girmesi ve bir ortak olarak hizmet etmesi gerekecek. Araç ve sürücü arasındaki mükemmel etkileşim, kullanımın basit, sezgisel ve cazip olmasını gerektiriyor” dedi.
Prototip, görsel, akustik ve dokunsal unsurları birleştiren ve dikkat ve aktivite destek sistemini bir avatar olarak gösteren birkaç ekrandan oluşan bir kontrol paneli içeriyor. Araştırma projesinden elde edilen bulgular, iç mekan izleme, otonom sürüş ve eğlence sistemleri gibi alanlarda daha fazla gelişme sağlayacak. Bu bulgular yalnızca kamyonlar için değil, aynı zamanda karayolu trafiğinde güvenliği artırmaya yönelik olmaları nedeniyle otomobillere de uygulanabilir.









